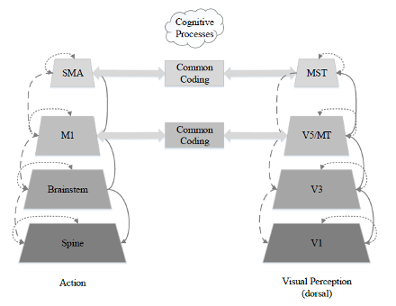
 .The brain comprises hierarchical modules on various physiological levels. Neural feedback signals (including lateral and top-down connections) modulate the neural activities via inhibitory or excitatory connections within/between these levels. They have predictive and filtering functions on the neuronal population coding of the bottom-up sensory-driven signals in the perception-action system. In this thesis, we propose that the predictive role of the feedback pathways at most levels of action and perception can be modelled by the recurrent connections in different artificial cognitive platforms (simulation and humanoid robots). This will be examined by three recurrent neural network models. Furthermore, the three models and experiments with them show that the recurrent neural networks are able to model feedback pathways and to exhibit the feedback-related sensorimotor predictive functions. This work was sponsored by EU Marie Curie RobotDoc project. PART I: In the first model, inspired by the study of neurobiology, we emphasize that the feedback connections facilitate a predictive mechanism to compensate for the neural delay in the two streams (ventral and dorsal) of the visual system. We model this with a novel recurrent network with a horizontal product. In the simulation, the recurrent connections give rise to the fast- and slow-changing neural activations in the dorsal- and ventral-like hidden layer. Particularly the recurrent connections build a feedback channel to predict the upcoming neural activity in the dorsal-like hidden layer, while another feedback channel maintains stable neural encoding in the ventral-like hidden layer. (Fig. 1) Publication: Zhong, Junpei, Cornelius Weber, and Stefan Wermter. "Learning features and predictive transformation encoding based on a horizontal product model." Artificial Neural Networks and Machine Learning–ICANN 2012. Springer Berlin Heidelberg, 2012. 539-546. [Code] [Paper] 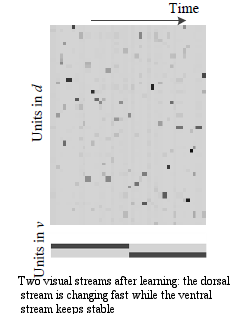 PART II: In the second part of the thesis, a sensorimotor integration model with visual prediction is implemented, whose visual perception part is considered to be the dorsal stream representation of the first model. This further augments the visual prediction with its role of guiding motor action. Together with the action module which adopts a continuous reinforcement learning algorithm, this model allows a smooth and faster docking behaviour for a humanoid robot. Publication: Zhong, Junpei, Cornelius Weber, and Stefan Wermter. "A predictive network architecture for a robust and smooth robot docking behavior." Paladyn, Journal of Behavioral Robotics 3.4 (2012): 172-180. [Link][Code (Continuous Actor Critic)] PART III:
In the third experiment, we propose that the source of the feedback pathway could be the high-level cognitive processes, such as pre-symbolic representations. Furthermore, the emergence of these cognitive processes and feedback-related sensorimotor functions are not independent processes but they integrate and assist each other in a hierarchical way. Therefore, we augment the first horizontal product model with additional units, called parametric bias (PB) units, as a pre-symbolic representation. In the robot experiments, we show that during the learning process of observing sensorimotor primitives, the pre-symbolic representation is self- organized in the parametric units; during prediction, these representational units act as a prior expectation which guides the robot to recognize and to expect various pre-learned sensorimotor primitives. Publication: Zhong, Junpei, Angelo Cangelosi, and Stefan Wermter. "Toward a self-organizing pre-symbolic neural model representing sensorimotor primitives." Frontiers in behavioral neuroscience 8 (2014). [Link] [Code] These three experiments demonstrate that implementation of the feedback pathways with recurrent connections can realize predictive sensorimotor functions. The emergence of these feedback pathways also accounts for the pre-symbolic representation in cognitive systems. Furthermore, we claim that the recurrent connections can be one of possible neural structures to build up the feedback pathways on the sensorimotor integration in artificial cognitive systems.
0 Comments
Your comment will be posted after it is approved.
Leave a Reply. |
 RSS Feed
RSS Feed
